



爱回收
75.46M · 2026-04-05

近年来,无人机在航拍、巡检、物流、农业、应急救援等领域的应用持续扩大,但与此同时,也带来了新的管理与安全挑战:
在大量实际场景中,“视觉感知”依然是最具性价比、最容易规模化部署的技术路径。因此,如何借助计算机视觉算法,稳定、实时地识别并定位无人机目标,成为一个具有现实意义的工程问题。
哔哩哔哩视频下方观看:
www.bilibili.com/video/BV1cY…

完整项目源码
预训练模型权重
️ 数据集地址(含标注脚本
从目标检测角度看,无人机具备以下典型特征:
这类特征,对检测模型在小目标识别能力、推理速度和稳定性方面提出了较高要求。
YOLOv8 在实际工程中具备明显优势:
因此,本项目以 YOLOv8 Detection 分支作为无人机识别的核心算法模块。
本项目并非单一模型验证,而是从一开始就以“可交付系统”为目标进行设计,整体架构如下:
数据采集与标注
↓
YOLOv8 模型训练与评估
↓
统一推理接口封装
↓
PyQt5 可视化检测系统
↓
多输入源部署(图像 / 视频 / 摄像头)
最终目标是:
为了提升模型泛化能力,数据集中包含多种复杂场景:
通过引入多样化样本,避免模型只在“理想环境”下有效。
项目采用标准 YOLO 数据组织方式:
dataset/
├── images/
│ ├── train/
│ └── val/
├── labels/
│ ├── train/
│ └── val/
每张图片对应一个 .txt 文件,格式如下:
class_id x_center y_center width height
其中坐标均为 相对比例值,便于模型适配不同分辨率输入。
yolo detect train
data=drone.yaml
model=yolov8n.pt
epochs=100
batch=16
imgsz=640
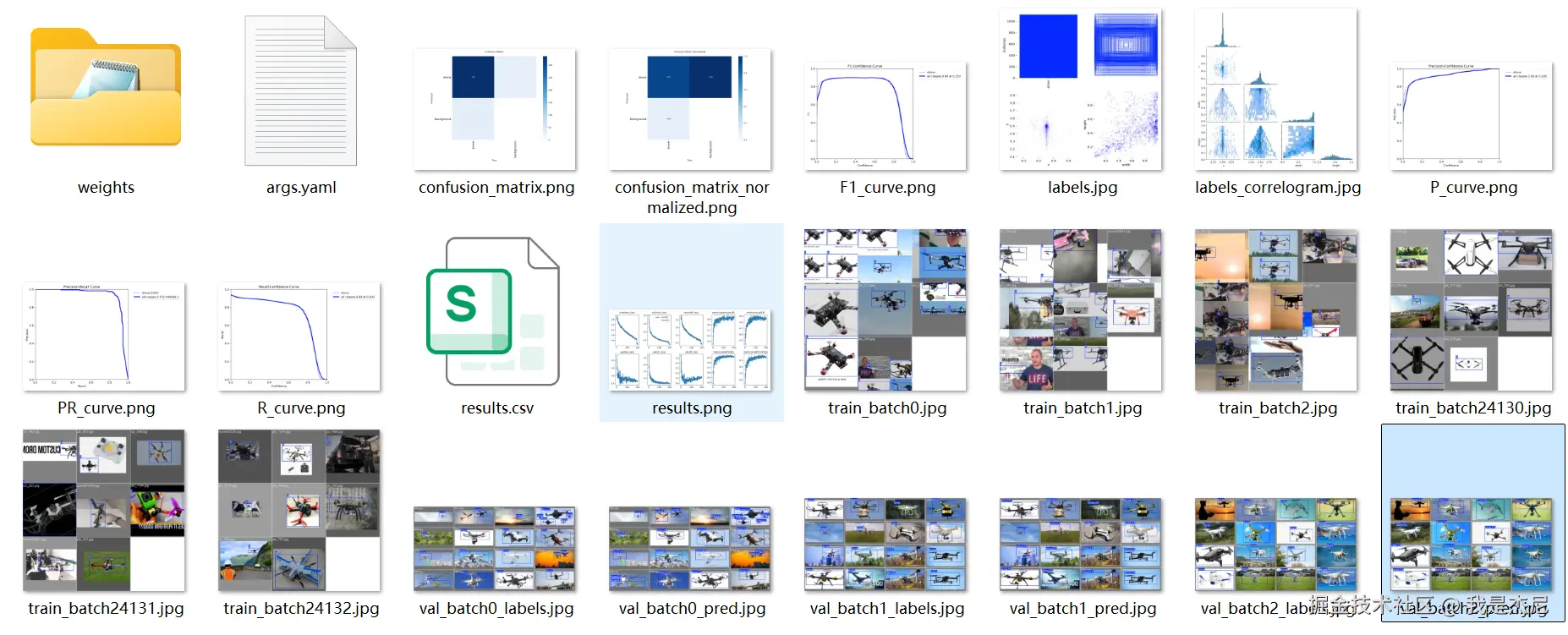
在无人机检测任务中,训练阶段应重点关注:
当模型在验证集上表现稳定,且 mAP@0.5 达到较高水平,即可进入部署阶段。
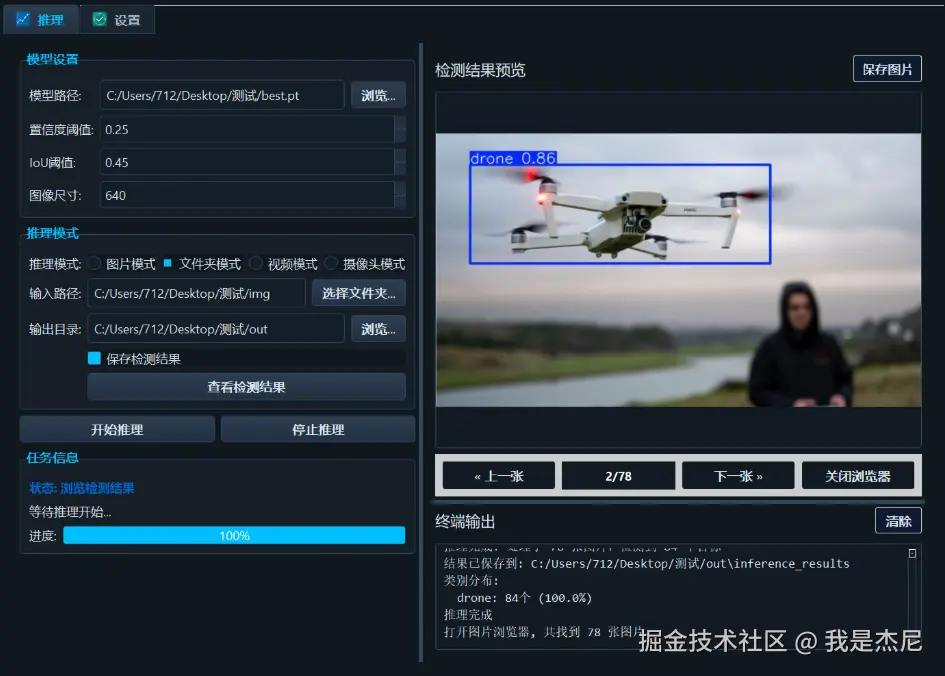
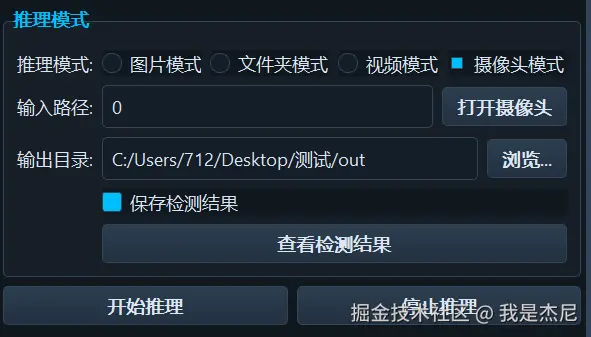
为了贴合真实使用需求,系统支持多种检测模式。
适用于:
这是无人机识别的核心应用场景:
许多算法项目的价值,止步于“代码能跑”。 本项目通过 PyQt5 构建完整 GUI,将算法能力真正“产品化”。
from ultralytics import YOLO
model = YOLO("best.pt")
results = model(frame, conf=0.25)
for box in results[0].boxes:
cls_id = int(box.cls)
conf = float(box.conf)
x1, y1, x2, y2 = box.xyxy[0]
通过该接口即可获取:
为后续 目标跟踪、轨迹分析、告警联动 提供基础数据。
项目已完成完整工程封装,包含:
python main.py
无需重新训练,即可体验完整无人机检测流程。
在现有系统基础上,可进一步扩展至:
系统具备良好的可扩展性,适合作为研究与工程实践的基础平台。
本文从实际空域感知需求出发,系统性地介绍了一套 基于 YOLOv8 的无人机位置捕捉与识别工程方案。该方案不仅在算法层面实现了对无人机目标的高效检测,还通过 PyQt5 图形界面完成了从模型到应用的工程化落地,真正解决了“能用、好用、易扩展”的问题。
对于希望快速进入目标检测实战、开展无人机识别研究或构建安防监控原型系统的开发者而言,该项目具备较高的学习价值与复用价值。

