
职业杀手
26.53M · 2026-03-25

OpenClaw 在 AI Agent 领域的快速崛起,源于其在系统架构和工程实践上的多项技术创新。它不是简单的聊天机器人,而是一个生产级 AI 智能体运行时平台。
核心差异:大多数 AI 助手(ChatGPT、Claude)本质上是对话界面,而 OpenClaw 被定义为 Agent Runtime Platform。
技术实现:
实际案例:
用户: "重构认证系统使用 JWT"
传统 Agent: 提供代码示例和步骤说明
OpenClaw:
1. 搜索现有认证代码(Explore Agent)
2. 生成重构计划(Plan Agent)
3. 安装依赖 npm install jsonwebtoken
4. 修改代码文件
5. 运行测试验证
6. 创建 git commit
设计理念:在用户本地环境运行,所有数据保留在本地。
技术优势:
架构实现:
~/.OpenClaw/
├── agents/ # 每个 Agent 独立工作区
├── sessions/ # 会话历史(JSONL 格式)
├── credentials/ # 凭证存储(加密)
└── config.json # 全局配置
设计模式:采用专业化智能体分工,而非单一模型处理所有任务。
智能体类型:
协作优势:
性能数据:
技术创新:打破 Agent 只能存在于网页或 IDE 的局限。
支持渠道:
协议抽象:
// 所有渠道消息归一化为标准格式
interface StandardMessage {
id: string;
channelType: 'telegram' | 'discord' | 'slack' | 'cli';
userId: string; // 统一用户 ID(跨平台)
content: string;
metadata: { platform: string; };
}
使用场景:
安全机制:
沙箱隔离:
工作区隔离:
权限控制:
可观测性:
关键设计:
所有渠道(T@elegrimm、Discord、Slack、CLI)的消息被归一化为标准格式:
interface StandardMessage {
id: string; // 全局唯一消息 ID
channelType: 'telegram' | 'discord' | 'slack' | 'cli';
channelId: string; // 渠道内的会话 ID
userId: string; // 统一用户 ID(跨平台)
content: string; // 消息内容
attachments?: Attachment[]; // 附件(图片、文件)
metadata: {
platform: string; // 原始平台标识
rawMessage: any; // 原始消息对象(调试用)
};
}
优势:
ChannelPlugin 接口~/.OpenClaw/
├── agents/
│ ├── agent-001/ # Agent 1 的工作区
│ │ ├── sessions/ # 会话历史(JSONL)
│ │ ├── memory/ # 长期记忆
│ │ ├── files/ # 工作文件
│ │ └── config.json # Agent 配置
│ └── agent-002/ # Agent 2 的工作区
│ └── ...
├── credentials/ # 凭证存储(加密)
└── config.json # 全局配置
隔离机制:
cwd(工作目录)Docker Sandbox(高风险代码执行):
// 在隔离容器中执行 Bash 命令
const result = await dockerSandbox.execute('npm install lodash', {
image: 'node:22-alpine',
memoryLimit: 512 * 1024 * 1024, // 512MB
cpuQuota: 50000, // 50% CPU
networkMode: 'none', // 禁用网络
timeout: 30000, // 30s 超时
});
Browser Sandbox(网页交互):
// 在隔离浏览器上下文中执行脚本
const data = await browserSandbox.execute(`
return document.querySelector('.price').textContent;
`, {
url: 'https://example.com',
permissions: [], // 禁用所有权限
viewport: { width: 1280, height: 720 },
});
安全特性:
OpenClaw 采用专业化智能体分工模式:
协作模式:
委派模式(Delegation): 用户: "重构认证系统使用 JWT" Main Agent → Plan Agent: 生成实现计划 Plan Agent → Main Agent: 返回 5 步计划 Main Agent → Bash Agent: 安装依赖 Main Agent: 执行代码修改 Main Agent → Bash Agent: 运行测试
流水线模式(Pipeline): Explore Agent → Plan Agent → Main Agent → Bash Agent (搜索代码) (设计方案) (实现功能) (验证测试)
并行模式(Parallel): Main Agent 同时委派: ├─ Explore Agent: 分析前端性能 ├─ Explore Agent: 分析后端性能 └─ Bash Agent: 运行性能测试
工具访问控制:
如果你正在构建类似系统,以下设计值得借鉴:
问题:多平台消息格式不一致。
方案:定义标准消息接口 + 适配器模式。
interface ChannelPlugin {
name: string;
initialize(deps: Dependencies): Promise<void>;
sendMessage(target: Target, message: Message): Promise<void>;
onMessage(handler: MessageHandler): void;
}
问题:Agent 状态丢失。
方案:JSONL 增量写入 + 事件溯源。
// 每个事件追加一行
{ "type": "user_message", "content": "...", "timestamp": 1234567890 }
{ "type": "thinking", "content": "...", "timestamp": 1234567891 }
{ "type": "tool_call", "tool": "read_file", "args": {...}, "timestamp": 1234567892 }
问题:多 Agent 文件冲突。
方案:独立目录 + 路径沙箱。
// 自动限制文件操作在工作区内
const workspace = new Workspace('/home/user/.openclaw/agents/agent-001');
await workspace.readFile('data.json'); // 实际路径: /home/user/.openclaw/agents/agent-001/data.json
问题:业务逻辑与基础设施耦合。
方案:清晰的层次边界 + 依赖注入。
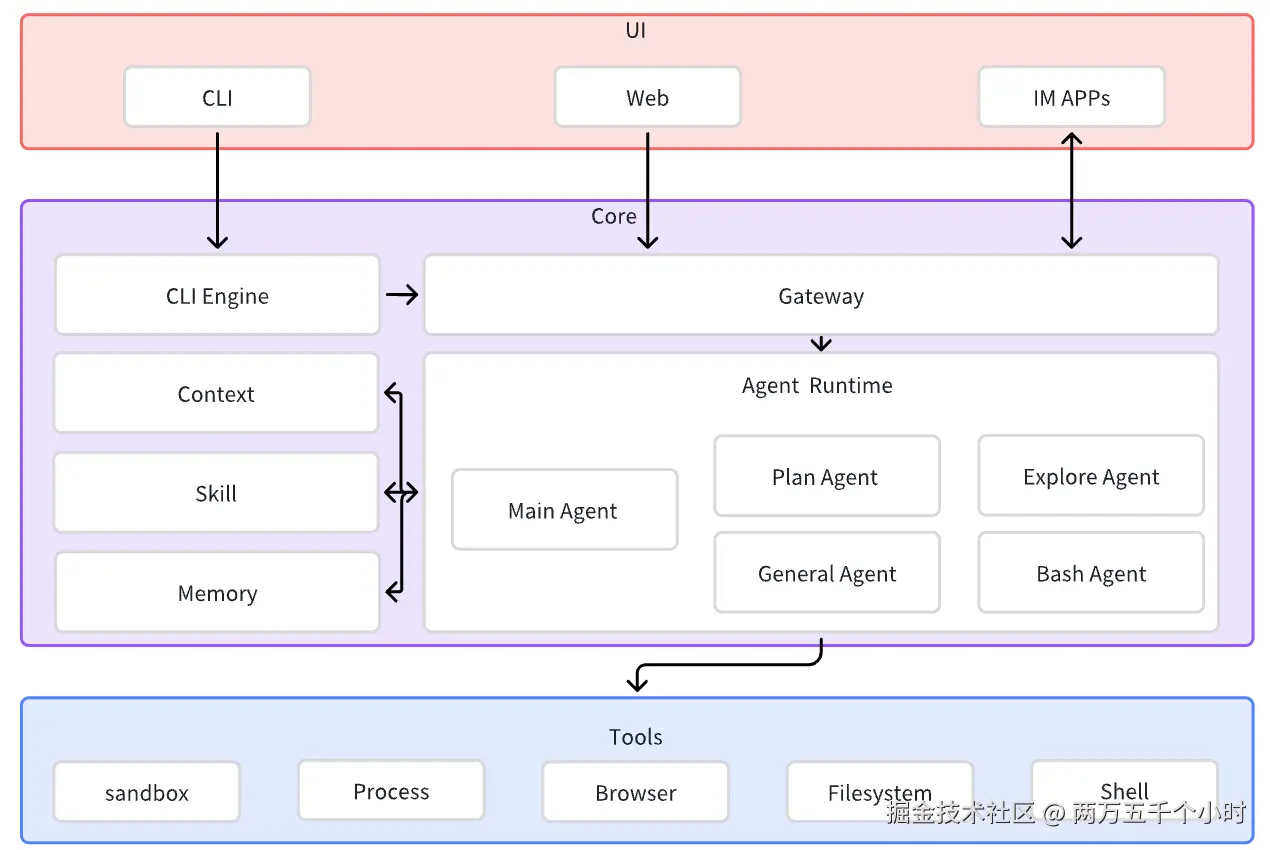
Presentation Layer (CLI, Web, Mobile)
↓
Access Layer (Gateway, API Server)
↓
Business Layer (Agent Orchestrator, Command Handlers)
↓
Service Layer (Model Service, Memory Service)
↓
Tool Layer (File Tools, Git Tools, Code Tools)
↓
Data Layer (File System, Session Store)
OpenClaw 的架构设计围绕以下核心原则:
这些设计使 OpenClaw 不仅是一个聊天机器人,而是一个生产级 AI 智能体运行时平台。
下一篇:Agent Runtime 深度解析 - 探索工作区隔离、会话管理和事件驱动架构的实现细节。
参考资源:

