吃掉小鹿乃手机版
3.76M · 2025-09-14

alixixi 9 月 14 日消息,在主动三维成像技术中,激光雷达(LiDAR)因其具备直接测距、高空间分辨率和强环境适应性的优势,已广泛应用于自动驾驶、机器人感知和高精度测绘等领域。
根据光束覆盖方式的不同,现有激光雷达系统主要分为扫描式和闪光式两类。然而,扫描式系统虽具备毫米级精度与千米级探测距离,但逐点扫描效率低下;闪光式虽可瞬时全局成像,却牺牲了分辨率与探测范围。
华中科技大学今日宣布,该校联合清华大学、北京信息科技大学,研发出了一种全新的“双模态”激光雷达系统,为自动驾驶汽车、机器人、无人机等设备的三维感知能力带来进一步提升。
这项技术成功解决了长期困扰激光雷达领域的核心难题 —— 如何在扩大探测范围、提升分辨率和加快扫描速度之间取得完美平衡。
alixixi查询发现,相关成果已于 8 月 25 日发表在国际光学期刊《光:科学与应用》上(https://doi.org/ 10.1038 / s41377-025-01999-4)。
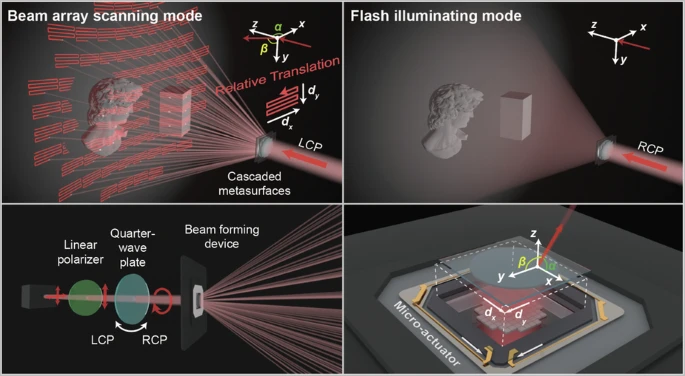
研究团队设计了一种名为“机械可调谐混合级联超表面”(THCM)的核心元件,由两层功能不同的超薄平面光学结构(超表面)垂直堆叠而成,并利用几何相位与传播相位超表面级联调控,通过调制光的偏振状态,在高精度波束扫描模式与高效闪光照明模式之间灵活切换,适应不同场景下的三维感知需求。
广角模式(FLASH 成像):当调整至该模式,系统能将激光扩散成一个预先设定好的均匀点阵,瞬间照亮整个大范围视场,快速生成一张场景的概略深度地图,高效识别出哪些区域可能存在感兴趣的目标。
精准模式(OPA 扫描):当从 FLASH 模式识别到特定目标后,MEMS 驱动器会瞬间将超表面调整至精准模式。此时,系统为一个高精度光学相控阵,通过改变激光波长来控制单一光束的方向,对目标进行扫描,获取精准的三维细节。
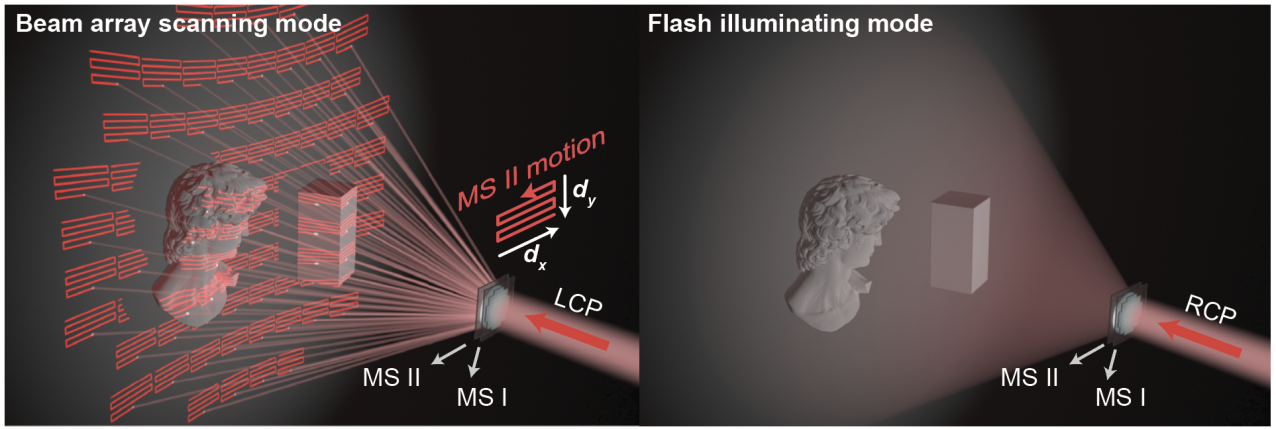
通过控制入射光的偏振态,即可实现两种光束覆盖模式间的灵活切换:左旋圆偏振光对应点阵扫描模式,级联超表面间 ±100 μm 微小相对面内平移可实现 ±35° 二维视场的高准直点阵光束扫描,改变位移步长可动态调整分辨率,适用于高精度、远距离的三维扫描任务;右旋圆偏振光对应闪光模式,通过一次性照亮整个视场,可实现瞬时三维成像。
相比现有方案,该技术能有效兼顾探测分辨率、视场范围与探测效率等关键指标,能够满足复杂环境下的高精度三维探测与快速全局感知需求,为新一代激光雷达系统、自主导航以及先进三维成像技术的发展提供了新思路。
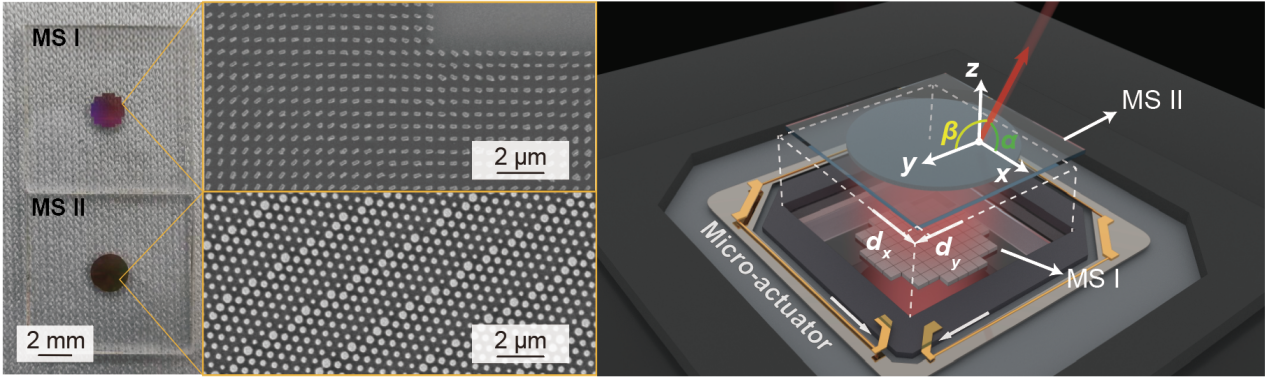
混合级联超表面作为器件的核心,第一层为偏振敏感的几何相位超表面并采用阵列化设计,第二层为非偏振敏感的传输相位超表面。级联超表面针对 1064 nm 波长设计,分别采用标准微纳加工工艺制备,包括等离子增强化学气相沉积(PECVD)、电子束曝光(EBL)与感应耦合等离子体刻蚀(ICP)等步骤加工。光束调控器件集成形状记忆合金微致动器实现两层超表面之间的高精度面内位移驱动,具备微型化、响应快和易集成等优势。
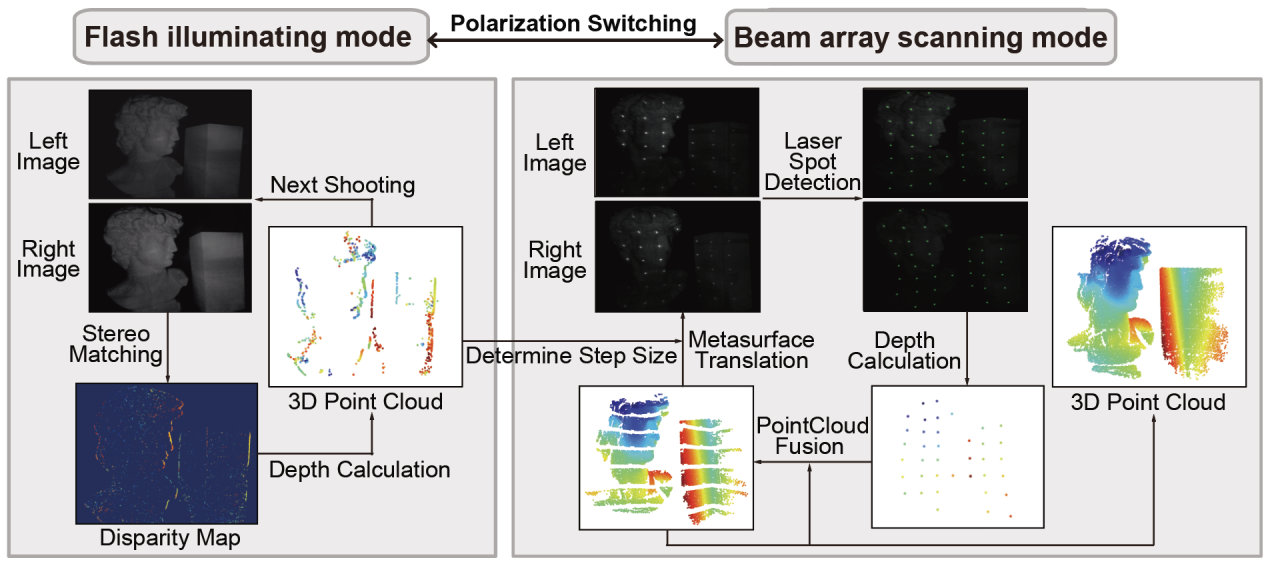
此外,研究团队基于光束调控器件构建了一套双模式激光雷达系统与自适应三维重建方案。系统首先工作在闪光模式下,快速完成整场景的快照式三维探测,获取目标边界形貌与复杂度信息。该初步数据为后续扫描模式中的步进策略提供依据,使系统能够根据实际目标特征智能选择扫描分辨率。在波束扫描阶段,系统可灵活执行粗略或精细的定向扫描任务,兼顾整体效率与局部细节。该系统通过偏振态驱动实现两种模式间的灵活切换,在保证全局快速探测的同时精确捕捉目标关键特征,突破了传统单一激光雷达在效率与精度之间互相矛盾的性能瓶颈。
基于混合级联超表面多通道、高自由度光束整形能力,双模式激光雷达系统在融合扫描式激光雷达高精度与 flash 激光雷达高效率优势时,显著提升了在复杂环境与多样探测任务下的适应性与灵活性。此外,借助超表面器件的超薄、超轻与可集成优势,研究团队研发出一套轻量化、精度可调的光束调控平台,可与飞行时间法、双目视觉等多种三维成像机制兼容,具备良好的系统集成与功能扩展能力。研究团队表示,该工作不仅构建了可适配多任务需求的高性能三维感知平台,也为推动激光雷达系统的小型化、智能化与多模式探测发展提供了新思路。
3.76M · 2025-09-14
35.67M · 2025-09-14
304.39M · 2025-09-14

